





主要職責
中國科學院貫徹落實黨中央關于科技創新的方針政策和決策部署,在履行職責過程中堅持黨中央對科技工作的集中統一領導。主要職責是:
一、開展使命導向的自然科學領域基礎研究,承擔國家重大基礎研究、應用基礎研究、前沿交叉共性技術研究和引領性顛覆性技術研究任務,打造原始創新策源地。 更多+
院況簡介
中國科學院是國家科學技術界最高學術機構、國家科學技術思想庫,自然科學基礎研究與高技術綜合研究的國家戰略科技力量。
1949年,伴隨著新中國的誕生,中國科學院成立。建院70余年來,中國科學院時刻牢記使命,與科學共進,與祖國同行,以國家富強、人民幸福為己任,人才輩出,碩果累累,為我國科技進步、經濟社會發展和國家安全作出了不可替代的重要貢獻。 更多+
院領導集體


科技獎勵
科技期刊

工作動態/ 更多


中國科學院學部
中國科學院院部

語音播報

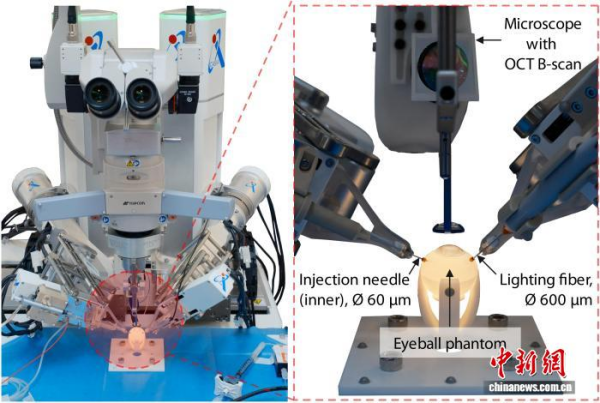
本項研究的顯微眼科機器人及其自主進行視網膜手術示意圖。中國科學院自動化研究所供圖

顯微眼科機器人研發團隊代表合影。中國科學院自動化研究所供圖
“眼睛是心靈的窗戶”,在這個軟組織結構精細、操作空間狹小的“窗戶”上做手術,每一次手動操作都面臨巨大挑戰。隨著人工智能技術的快速發展和廣泛應用,眼科手術機器人研發也成為業界聚焦和攻關的重要方向。
中國科學院自動化研究所1月19日向媒體通報,該所多模態人工智能系統全國重點實驗室邊桂彬研究員團隊最新成功研發出一款面向眼內空間的、自主顯微眼科手術機器人系統,并已驗證臨床可行性。
該機器人系統在整個眼內空間能實現自主的視網膜下和血管內注射,可顯著提高眼底注射的精確性、安全性和一致性,最大限度減少醫源性損傷,可輔助外科醫生更加專注于手術設計和監督任務。相關成果論文,近日在專業學術期刊《科學-機器人》(Science Robotics)發表。
論文通訊作者邊桂彬研究員指出,視覺是人類感知世界、獲取外部信息最主要的渠道。據世界衛生組織統計,全球已有超22億人視力受損或失明。在眼科手術中應用自主機器人手術系統,能通過更加智能、精準的操作控制提升手術安全性,縮短外科醫生學習曲線,為多種眼科疾病治療提供新的可能,惠及更多患者。
論文共同第一作者、中國科學院自動化研究所博士生鄧雅文介紹說,在本項研究中,研究團隊通過研發自主顯微眼科手術機器人系統,創新構建了從術中三維空間感知、跨尺度精確定位到軌跡精準控制的核心算法模塊。
三維空間感知方面,提出一種多視角空間融合方法,有效克服多模態眼內成像中的成像異質性和動態空間失準問題,構建術中動態更新的全局三維地圖,實現對眼內區域的全面感知。
精確定位方面,提出一種基于準則加權的多傳感器數據融合方法,解決了檢測范圍、誤差幅度和采樣頻率的差異,使機器人手術器械尖端在眼內區域實現精確的宏觀-微觀定位。
軌跡控制方面,提出多約束目標優化方法,對機器人末端執行器的軌跡進行精確規劃,并結合人監督下的力-位置-影像混合控制,確保手術的安全性。
在眼球假體、離體豬眼球及活體動物眼球的視網膜下注射與血管注射實驗驗證中,該自主顯微眼科手術機器人系統均實現100%的注射成功率,與醫生手動手術及醫生主從操作機器人手術相比較,平均定位誤差分別減少79.87%和54.61%,表現出更高的安全性和精準性。
邊桂彬表示,這項研究成果為眼內手術自主化開辟了全新技術路徑,不僅驗證了自主機器人在顯微手術中應用的可行性,更有望推動眼科手術治療實現智能化、精準化升級,并在遠程醫療和極端環境等復雜場景中展現出巨大應用潛力。





© 1996 - 中國科學院 版權所有 京ICP備05002857號-1  京公網安備110402500047號 網站標識碼bm48000002
京公網安備110402500047號 網站標識碼bm48000002
地址:北京市西城區三里河路52號 郵編:100864
電話: 86 10 68597114(總機) 86 10 68597289(總值班室)